| PRAKLA-SEISMOS Report 4 / 1976 | ||||
 |
||||
|
Wesentliche Eigenschaften und ihre Uberprüfung, 2. Teil Die Prüfung der Geophone wird bei PRAKLA-SEISMOS routine mäßig bei den Trupps und in der Zentrale in Hannover durchgeführt. Wegen der sehr großen Anzahl der zu überprüfenden Geophone (bei einem Trupp sind etwa 3000 Geophone eingesetzt), muß die Prüfmethode ein Komprorniß sein zwischen Testumfang und -Genauigkeit, benötigter Zeit und Einfachheit der Testanordnung. Für den Mann an der Geophonauslage genügt ein Gerät, das die Aussage liefert: "In Ordnung" oder "kaputt". Er hat nicht die Zeit und Möglichkeit nach dem Grund eines Fehlers im Geophon zu suchen. Der Meßtechniker oder das Truppbüro verfügen bereits über Instrumente wie z. B. Oszillator und Oszillograph, um einen eventuellen Fehler weiter einzukreisen: Spulenwiderstand, Resonanzfrequenz und Polarität können gemessen werden. Dies sind zweifellos wesentliche Eigenschaften des Geophons. Die übrigen Parameter, z. B. Dämpfung und Verzerrung, zur Zeit nur sporadisch in der Zentrale bestimmt, werden in naher Zukunft auch bei den Trupps gemessen werden können. |
The Geophone Its essential features and the related test procedures, Second part Geophone testing with PRAKLA-SEISMOS is done routinely by the crews and in the technical department in Hannover. Because of the large number of geophones to be checked (each seismic party has about 3000 geophones in operation) the test method must be a compromise between extent and accuracy of tests, time needed and simplicity of the test set. The man at the geophone line only needs a tool that teils him: "0. K." or not "0 . K.". He hasn't the time or the opportunity to look for the cause of a geophone failure. The operator or the field office have tools at their disposal like a cable checking device and an oscilloscope to further locate the discrepancies such as coil resistance, resonant frequency and polarity. These are for sure essential features of the geophone. The remaining parameters (e. g. damping and distortion) up to now determined sporadically in the Technical Department in Hannover only, will be measured by the crews as weil in the near future. |
|||
Mitarbeiter G. Schnake an seinem Geophon-Prüfplatz in der Technischen Abteilung G. Schnake at his test set in the Technical Department  |
||||
|
Prüfmethoden Das Problem bei einer Relativ-Messung liegt darin, ein Standard-Geophon oder eine Standard-Kette zu finden, die für mindestens eine Geophon-Auslage repräsentativ sind. Die Messung mehrerer Parameter gleichzeitig (Impulsmethode) ist die schnellste, umfassendste und damit auch wirtschaftlichste Methode. Die Messung einzelner Kennwerte ist erforderlich, wenn Herstellerangaben zu überprüfen sind, oder wenn Standard-Geophone oder Standard-Ketten ermittelt werden sollen. Eine mechanische Anregung des Geophons wäre dem Einsatzfall am besten angepaßt. Ihre Anwendung ist jedoch kaum möglich, da ein Schütteltisch groß genug sein müßte, um ganze Ketten zu prüfen damit er wirtschaftlich eingesetzt werden kann. Außerdem dürfte dabei ein Klirrfaktor von größenordnungsmäßig nur 0,01 % auftreten, um die Verzerrungen von Geophonen (ca. 0,2%) messen zu können. Diese strengen Forderungen schließen die mechanische Anregung für die überprüfung der Geophone in der Praxis aus. Die elektrische Anregung ist eine indirekte Methode, weil das Geophon hierbei als Linear-Motor betrieben wird, während es im Einsatz als Generator arbeitet. Sie ermöglicht jedoch die Messung aller Kennwerte, Spulenwiderstand ausgenommen, mit der erforderlichen Genauigkeit an Einzelsystemen und an Ketten sowohl beim Trupp als auch in der Zentrale Hannover. Die Messung der einzelnen Kennwerte Empfindlichkeit Der Grundgedanke bei der elektrischen Anregung ist folgender: Spulenwiderstand Resonanzfrequenz
Dämpfung
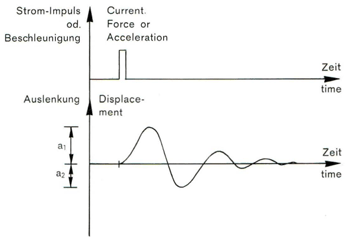
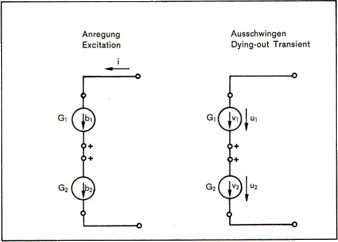
Bei einer mechanischen Messung der Dämpfung wäre eine mechanische Anregung des Geophons schwer zu reproduzieren -wie es nötig wäre. Ein "elektrischer Stoß" ist ein Stromimpuls von etwa 1 ms Dauer. Die Dauer des Impulses ist im allgemeinen kurz gegen die zu erwartende Schwingungsdauer von zum Beispiel 10 Millisekunden. Dem Stromimpuls entspricht mechanisch ein Kraft-und damit ein Beschleunigungsimpuls. Dadurch wird eine Bewegung der Spule eingeleitet, die eine Ausgangsspannung erzeugt. Diese Ausgangsspannung wird ausgewertet. Verzerrung Bei der Verzerrungsmessung wird dem als Motor betriebenen Geophon "vorgeschrieben", einen oberwellenfreien Strom aufzunehmen. Dies fußt auf der bereits bei der Empfindlichkeitsmessung angegebenen überlegung : Der zwischen den Geophonklemmen wirksame Widerstand ist -abgesehen vom Spulenwiderstand -der dort erwähnte Bewegungswiderstand (Resonanzfrequenz = Meßfrequenz). Nach dem Ohm'schen Gesetz muß ein rein sinusförmiger Strom eine an einem Ohm'schen Widerstand rein sinusförmige Spannung erzeugen. Oberwellen dieser Spannung können daher nur durch die Bewegung im Geophon entstanden sein Messung der resultierenden Wirkung mehrerer Parameter Einer der in der Praxis am häufigsten auftretenden Fehler - die Verpolung von Geophonen - kann mit der Impulsmethode prinzipiell nicht gefunden werden. Zur Erläuterung sei In Figur 3 angenommen, daß zwei Geophone G1 und G2 in Reihe geschaltet sind, wobei eines von beiden entgegengesetzt gepolt ist. Beide Geophone werden mit demselben Stromimpuls i angeregt. Die Masse von G1 werde nach oben, die von G2 daher nach unten ausgelenkt; sie liefern mithin Spannungen entgegengesetzter Polarität. Wegen der Verpolung eines der beiden Geophone sind die Spannungen in der Reihenschaltung jedoch gleichgerichtet, so daß eine Unterscheidung hinsichtlich der Polarität nicht möglich ist. Rückblick auf die Entwicklung und den Einsatz der Geophone bei PRAKLA, SEISMOS und bei PRAKLA-SEISMOS Die hier wiedergegebenen Daten sind nicht ganz vollständig. Eine kontinuierliche Dokumentation über den Einsatz der "Seismographen" bzw. der Geophone ist leider nicht durchgeführt worden. Trotzdem hoffen wir, einen doch recht ausführlichen Gberblick geben zu können. Die folgenden Angaben beruhen zum Teil auf mündlicher Gberlieferung durch ältere Angehörige unserer Gesellschaften. Hier müssen wir vor allem Dr. H. W. Maaß und Dr. W. Beuermann erwähnen. Dr. H. W. Maaß ist außerdem für die Redaktion dieses Kapitels im wesentlichen verantwortlich. REFLEXIONSGEOPHONE Vor dieser Zeit wurden bei beiden Firmen selbstentwickelte und selbstgebaute Seismographen Gingesetzt. Die SEISMOS hatte bereits i. J. 1930 mit dem Bau von Seismographen, damals " Pendel" genannt, begonnen. In dem 1934 verbesserten Typ bestand das elektromagnetische System aus einem an Blattfedern aufgehängten Schwinganker zwischen den Polen eines Dauermagneten. Die Daten: Eigenfrequenz ca. 35 Hz, Empfindlichkeit ca. 0,85 V/cm/s, Spulenwiderstand 400 Q, Gewicht 3 kg pro Seismograph! Stückzahl ca. 1000. Die BlattfederHebel-Konstruktion mit dem elektromagnetischen Wandlerprinzip wurde bei SEISMOS noch weitere 20 Jahre verwendet. Bei PRAKLA wurde bereits i. J. 1936 (F. Trappe und W. Zettel, DRP 707257) der elektrodynamische Tauchspulenwand'er entwickelt, gebaut und verwendet. Das NGC-Geophon, Typ 14-A, ähnelte im Aufbau einem elektrodynamischen Lautsprecher; es besaß bereits alle Merkmale eines modernen Geophons: Rotationsymmetrie des elektrodynamischen Wandlers, der Federung und der Führung (Zentrierung). Während die SEISMOS einen entsprechenden Nachbau in eigener Werkstatt herstellte, ließ die PRAKLA den Nachbau (G-11) bei der Firma " Labor Wennebostel" anfertigen. Diese Geophone hatten über 30 Hz Eigenfrequenz und wogen etwa 1 ,5 kg. Entsprechend dem damaligen Bedarf wurden nur einige Hundert Stück gebaut. Mit der Verbesserung des Magnetmaterials (Alnico) und des Federmaterials (Beryllium-Kupfer) konnten die Geophone kleiner werden. Etwa 1951 kam ein Geophon der Southwestern Industrial Electronics (SIE), Houston, auf den Markt, das bei einer Eigenfrequenz von etwa 25 Hz nur noch etwa 0,6 kg wog. Die SEISMOS führte 1952 gleichwertige Century-Geophone (Century Geophysical Corp., Tulsa) ein. Der weiterentwickelte Nachbau (ca. 2000 Stück) führte zu wesentlich kleineren Abmessungen mit den Daten : Eigenfrequenz 18 Hz, Empfindlichkeit 0,44 V/cm/s, Gewicht ca. 0,2 kg. Die PRAKLA entwickelte 1952 den Typ G-21 mit einer Eigenfrequenz von 24 Hz und einem Gewicht von 0,5 kg ; von diesem Typ wurden über 2000 Stück bei der Firma Naß/ Hannover angefertigt. Ab 1953 wurde seine Weiterentwicklung mit höherer Empfindlichkeit, das Geophon G-25, eingeführt. Bis zum Jahre 1962 wurden von diesem Typ über 20000 Stück bei Naß für PRAKLA produziert. Die SEISMOS setzte ab 1955 Hall-Sears-(Hall Sears Inc., Houston) Geophone ein und zwar zunächst eine Zwischengröße, die im Jahre 1961 durch den Typ HS-J ersetzt wurde. Mit diesem Typ wurde der Gipfel der Miniaturisierung erreicht. Das Geophon HS-J hatte eine Eigenfrequenz von 14 bis 28 Hz, sein Gewicht blieb unter 0,1 kg! Auch die PRAKLA setzte dieses Geophon in großen Stückzahlen ein. Im Jahre 1973 waren davon bei PRAKLA-SEISMOS noch 18.000 Stück vorhanden. Die Digitaltechnik stoppte den Drang zur Miniaturisierung. An die erste Stelle trat die Qualität der Aufzeichnung und das führte zur Anschaffung der nun wieder schwereren Geophone der Firma Sensor mit einem Gewicht von etwa 0,2 kg ; 1973 waren bei PRAKLA-SEISMOS 40000 SMGeophone im Einsatz: 5600 SM 1, 22150 SM 2 und 13150 SM 4; zusätzlich waren 2800 Sumpfgeophone entweder mit HS-J Systemen oder SM 4-Systemen sowie 615 Flachwassergeophone, Typ HGL mit Sensorsystemen einsatzbereit. Das heute in der Seismik eingesetzte durchentwickelte Geophon hat im Wesentlichen folgende Merkmale: Zwei vorgespannte Federspinnen zur einwandfreien Führung der Spule, Vorspannung der Feder zur Kompensation des Massegewichtes, Maßnahmen zur Vermeidung von Drehund Horizontalschwingungen sowie von Schwingungen der Federspinnen, zwei gegensinnig gewickelte Spulenteile zur Vermeidung von elektrischen Einstreuungen, eine trockene inerte Gasfüllung und einen hermetischen Abschluß durch das Gehäuse nach außen. Zum Kapitel Reflexionsgeophone sei abschließend als Kuriosum vermerkt, daß um die Zeitwende 1948 in Deutschland ein handliches Geophon von B. Marsch erschien, das nach dem Wandlerprinzip des Kohlemikrophons (W iderstandsänderung bei Druckänderung) arbeitete, das jedoch nach einem kurzen Versuchseinsatz schnell wieder verschwand. REFRAKTIONSGEOPHONE
Für sehr tiefe Frequenzen hat die Blattfeder-Hebelkonstruktion überlebt. Die SEISMOS baute ab 1954 ca. 250 Stück Refraktionsgeophone vom Typ 3S-3 mit der Eigenfrequenz von 2,8 Hz, mit einer Empfindlichkeit von 2,5 V/cm/s, einem Spulenwiderstand von 400 Q, und mit einem Gewicht von 6 kg. Dieses Geophon wurde ab 1957 teilweise mit einem Transistor-Vorverstärker ausgerüstet. Im Jahre 1960 wurden 10 Geophone 3S-3 zum Typ 3S-1 weiterentwickelt, die bei gleichen Abmessungen eine einstellbare Eigenfrequenz zwischen 0,8 und 1,1 Hz und einen Bimetallstreifen zur Temperaturkompensation (DBP 1 151 948) besaßen. Die PRAKLA hat zunächst versucht, das Hebel-Geophon durch mechanische Verstärkung mittels Doppelhebel (DBP 1184096, A. Stein, 1960) zu verbessern. Die Idee der magnetischen Aufhängung (DBP 1 050559, Wachholz, 1957) führte zur Entwicklung des rotationssymmetrischen Refraktionsgeophones G 61 . Außerdem wurde das Refraktionsgeophon G 63 mit Drehstabfederung als Muster entworfen (DBP 1177352, Barteis, 1962). Alle drei Geophone haben sich jedoch im rauhen Feldbetrieb nicht bewährt, so daß sie nach kurzen Versuchseinsätzen wieder aus dem Verkehr gezogen wurden. Die PRAKLA führte dann die modernen Refraktionsgeophone von Hall Sears, Typ HS 1 mit 4,5 Hz und verschiedenem Gewicht von 0,269 kg bis 0,68 kg ein, das von der Konstruktion (Aluminium oder Messing) und von den Einsatzbedingungen (Land oder Marsch) abhing, sowie Typ HS 10 mit 1 Hz und 4,8 kg, und später das SensorGeophon Typ SM 1 mit 7,5 Hz und 0,254 kg. Im Jahr 1973 besaß PRAKLA-SEISMOS 1710 Refraktionsgeophone, davon 990 vom Typ HS 1, 220 vom Typ HS 10 und 500 vom Typ SM 1.
|
Test methods The first thing is to find a standard geophone or a standard string which is representative for a spread. Measuring several parameters at one time (impulse method) is the quiekest, most comprehensive a.nd thus the most economical method. Measuring individual parameters is necessary when checking the geophone specifications given by the manufacturer or to find a standard geophone or a standard string'. Mechanically exciting a geophone would be the approach matching the operational conditions best. However, such an application is scarcely possible because a shaker table would have to be large enough to allow the economical checking of entire strings. In addition, the allowable distortion would have to be in the order of 0.01 % to enable the measurement of geophone distortion of ca 0.2 %. These severe requirements exclude in practice the mechanical excitation. Electrically exciting a geophone is an indirect method because in this case the geophone is treated as a linear motor whereas it works as a generator in normal operation. However, it is in this way possible to measure all parameters, exept coil resistance, with the required accuracy. This is true both for a single geophone and for strings either in the crew or in the Technical Department in Hannover. Measuring individual parameters The basic idea of electrical excitation is as follows: Coil resistance Resonant frequency Damping It would be very difficult to generate such a pulse mechanically which is sufficiently stable and accurate. An electrical impulse is for example a current pulse of about 1 ms duration, in general one order of magnitude smaller than the expected time of the period of the oscillation, for example 10 ms.
The current pulse appears to the mechanical system as a force-or an accelleration pulse. The coil starts moving which in turn generates an output voltage. This voltage is evaluated. Distortion When measuring distortion the geophone operating as a motor is forced to draw a pure sinusoidal current. This is based on the idea already described in connection with the measurement of the sensitivity: the resistance between the geophone terminals is -apart from the coil resistance -the motional resistance (resonant frequency = measuring frequency). Ohm's law requires that a pure sinusoidal current develops a pure sinusoidal voltage across this resistance. Harmonics of this voltage must be due to the motion in the geophone. Measuring the resultant effect of several parameters A drawback of the method however is its principal inability to indicate one of the most frequently encountered errors: wrong polarity. To explain this, we assume two geophones G1 and G2 to be connected in se ries with reversed sequence of their terminals. They are excited by the same current pulse. The mass of G1 is moved upward, the mass of G2 consequently downward. They deliver voltages of opposite polarity with respect to an identical terminal of each single geophone. Because of the reversed order of the contacts, however, these voltages are lined up with equal polarity (figure 3) in the se ries connection. They cannot be discriminated from each other on the basis of polarity.
Data given below are possibly not quite complete. A continuous documentation on the application of seismographs or geophones has unfortunately not been made. The following data are partially based on oral tradition by older members of our companies. In this context we have to mention Dr. H. W. Maass and Dr. W. Beuermann in the first place. Moreover, Dr. H. W. Maass is essentially the responsible writer of this part of the article. REFLECTION GEOPHONES Before, both companies used seismographs of their own development and construction. SEISMOS had al ready started to build seismographs -then called pendulum -in 1930. In 1934 an improved version had an electromagnetic system whose swinging lever was suspended between the poles of a permanent magnet by means of leaf springs. Its specifications: Resonant frequency ca 35 Hz, sensitivity ca 0.85 V/s/cm, coil resistance 400 Q, weight 3 kp, number of built seismographs ca 1000. The leaf-spring-Iever-construction combined with the electromagnetic transducer was used by SEISMOS for another 20 years. PRAKLA developed, built, and used already in 1936 (F. Trappe and W. Zettel, DRP 707257) the electromagnetic moving coil transducer. The NGC-geophone, type 14-A, was very similar in construction to a moving coil loudspeaker; it had already all the characteristics of a modern geophone: Rotational symmetry of the electrodynamic trancducer, of the springs and of the guidance (centering). SEISMOS manufactured a corresponding reproduction type in its own workshop, PRAKLA had its reproduction type G-11 produced by "Labor Wennebostel". These geophones had aresonant frequency above 30 Hz and a weight of about 1.5 kp. In accordance with the need at that time only some hundreds were built. Improvements in material for magnets (Alnico) and springs (Berillium-Copper) allowed the construction of geophones of smaller size. About 1951 a geophone from Southwestern Industrial Electronics (SIE), Houston, came onto the market with aresonant frequency about 25 Hz, and which weighed 0.6 kp only. PRAKLA ordered a corresponding reproduction type frorn Labor Wennebostel in the same year. Only scarcely 100 geophones of this type (G-15) were built. In 1952 SEISMOS introduced equivalent Century-Geophones (Century Geophysical Corp., Tulsa). The further development (ca 2000 of them) led to a greatly reduced size with the following data: Resonant frequency 18 Hz, sensitivity 0.44 V/cm/sec, weight ca 0.2 kp. In 1952 PRAKLA developed the type G-21 with aresonant frequency of 24 Hz and a weight of 0.5 kp, over 2000 geophones of this type were manufactured by the company Nass / Hannover. In 1953 the geophone G-25 was introduced which was a further developement of G-21 with higher sensitivity. Nass/Hannover manufactured over 20000 of this type for PRAKLA up to the year 1962. Starting in 1955, SEISMOS put Hall-Sears geophones (Hall-Sears Inc., Houston) into operation. It was first an intermediate size which was replaced by the type HS-J in 1961 . By this type the peak of miniaturization was achieved. The geophone HS-J had aresonant frequency of 14 to 28 Hz, its weight was below 0.1 kp! PRAKLA applied this geophone in great numbers as weil. In 1973 there were still 18000 of them in operation with PRAKLA-SEISMOS. Digital technique stopped the desire for miniaturization. Recording quality took first priority and led to the aquisition of geophones from Sensor with again a higher weight of about 0.2 kp. In 1973 there were 30000 SMgeophones in operation with PRAKLA-SEISMOS : 5600 SM 1, 22150 SM 2, and 13150 SM 4. In addition, there were 2800 marsh geophones -either equipped with HS-J or with SM 4 -units, and 615 shallow water geophones -type HGL equipped with Sensor-units -ready for use. The fully developed geophone of today as applied in seismics has essentially the following characteristics : Two biased springs to maintain a faultless movement of the coil, prestressed springs for compensation of the weight of the mass, measures to avoid torsional and horizontal oscillation modes and tine resonances, dual coil construction to reduce electrical noise pickup, filling with a dry inert gas and a hermetically sealed case. To terminate the chapter on reflection geophones it shall be mentioned as a curiosity that a handy geophone from B. Marsch appeared on the German market around 1948 based on the transducer principle of a carbon microphone (changing pressure produces a resistance variation). However, it disappeared quickly after a short experimental operation. REFRACTION GEOPHONES The leaf-spring-Iever construction survived for very low frequency application. From 1954 on, SEISMOS built about 250 refraction geophones of the type 3S-3 with aresonant frequency of 2.8 Hz, a sensitivity of 2.5 V/s/cm, a coil resistance of 400 Q, and 6 kp of weight. This geophone was partially equipped with a transistor-preamplifier in 1957.
In 1960 the 3S-3 geophone was further developed to the type 3S-1 whieh had an adjustable resonant frequency between 0.8 and 1.1 Hz and a bimetal strip for temperature compensation (DBP 1 151 948). At first PRAKLA tried to improve the lever geophone by mechanieal amplification via a double lever (DBP 1184096, PRAKLA then introduced the modern refraction geophones from Hall Sears : Type HS 1 with 4.5 Hz resonant frequeney, 0.269 kp to 0.68 kp weight depending on the construction (aluminium or brass) or the operational conditions (land or marsh), further the type HS 10 with 1 Hz resonant frequeney and 4.8 kp weight, and later the Sensor geophone type SM 1 with 7.5 Hz resonant frequency and a weight of 0.254 kp. In 1973 PRAKLA-SEISMOS was in possession of 1710 refraction geophones of which 990 were of the type HS 1, 220 of type HS 10 and 500 of type SM 1.
|
|||
Report